
Wearables
The Hugging Hoodie
A sweater that embraces donors.
Role
Concept, electronics, CAD, 3D print, experiments
01
Idea
Thank you, donors.
A hug is the most powerful and emotional way to say thank you. This observation led to the idea of the Thank You Hoodie for an animal welfare organization. The problem: the animals wanting to thank the donors are thousands of kilometers away. No problem. The hoodie has fluffy monkey arms sewn on that give a hug at the push of a button.
02
Pneumatics
Nobody cuddles like Mr. McKibben.
What sounds simple in theory turns out to be complex in practice. How do you build a discreet, flexible mechanism that doesn't reveal the technology? The answer lay in artificial pneumatic muscles, named McKibben muscles after their inventor. They consist of an inflatable tube wrapped in a sturdy fabric sleeve. When the inner tube is filled with air, it does something unexpected: it becomes shorter, not longer. The result: the McKibben muscle in the fluffy arms contracts. Perfect for giving nice donors a nice hug.
03
1st iteration
Manual box
A small box hidden in the hoodie pockets contains the power supply, a relatively small air pump, and an electronic valve for pressure regulation. For the initial tests, two pushbuttons were sufficient: one for the pump and one for the valve regulating the pressure. The force was transmitted from the pocket to the shoulders via thin, soft silicone tubes. The result was encouraging: McKibben muscles achieve considerable pressure despite small components.
04
2nd
IoT controlled
Time to improve the control. In the second version, I added a more powerful power supply, an ESP-32 board with Wi-Fi and Bluetooth, and a pressure sensor. The logic based on Micropython became much smarter. The ESP board acts as a server. Via the web interface, the pressure sensor values could be monitored and the "hug" triggered. A button in the browser started the pump and closed the valve. When the pressure sensor detected sufficient hugging pressure, the pump stopped. After a defined time, the air pressure and hugging sensation were released.
05
Test
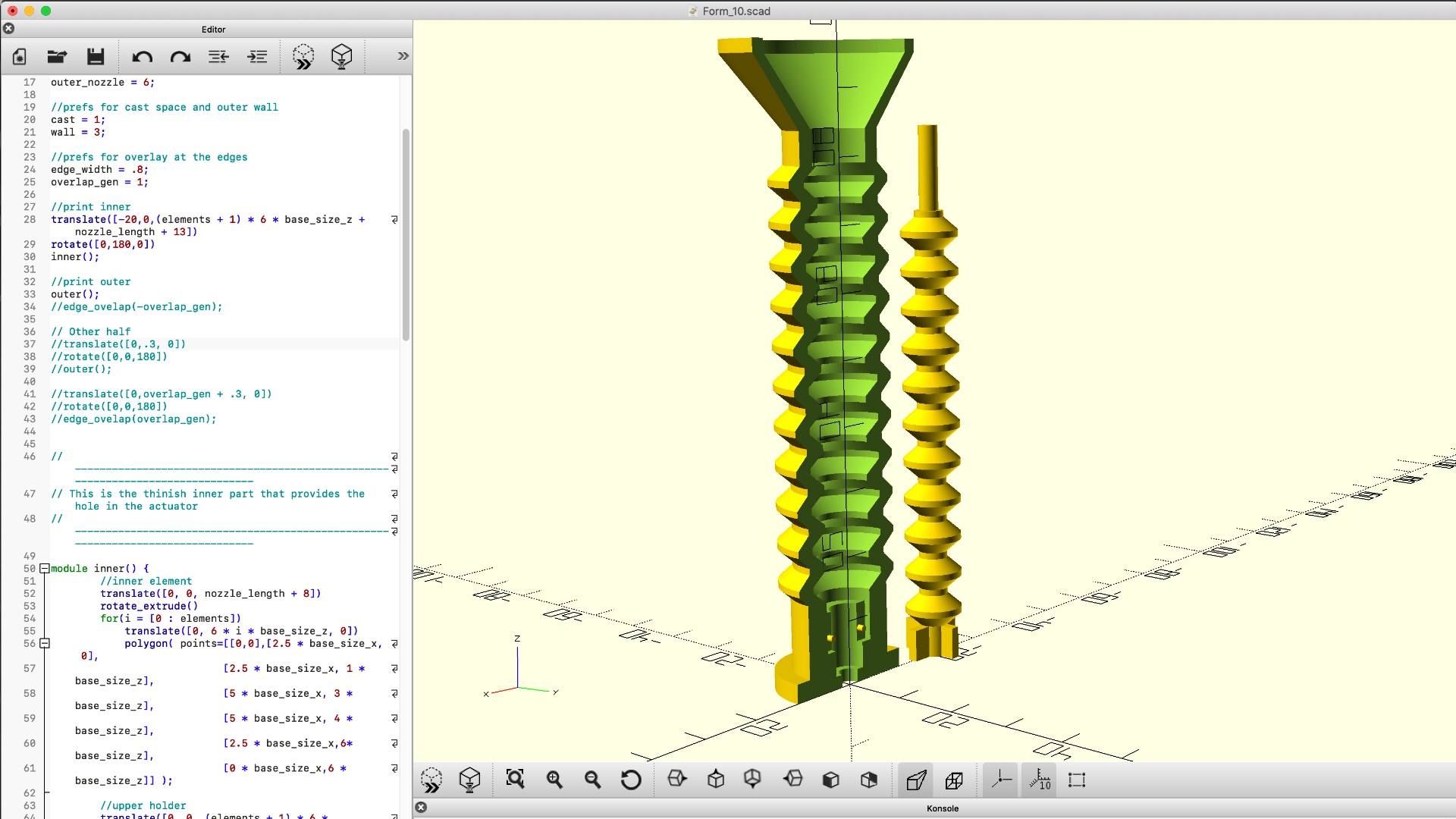
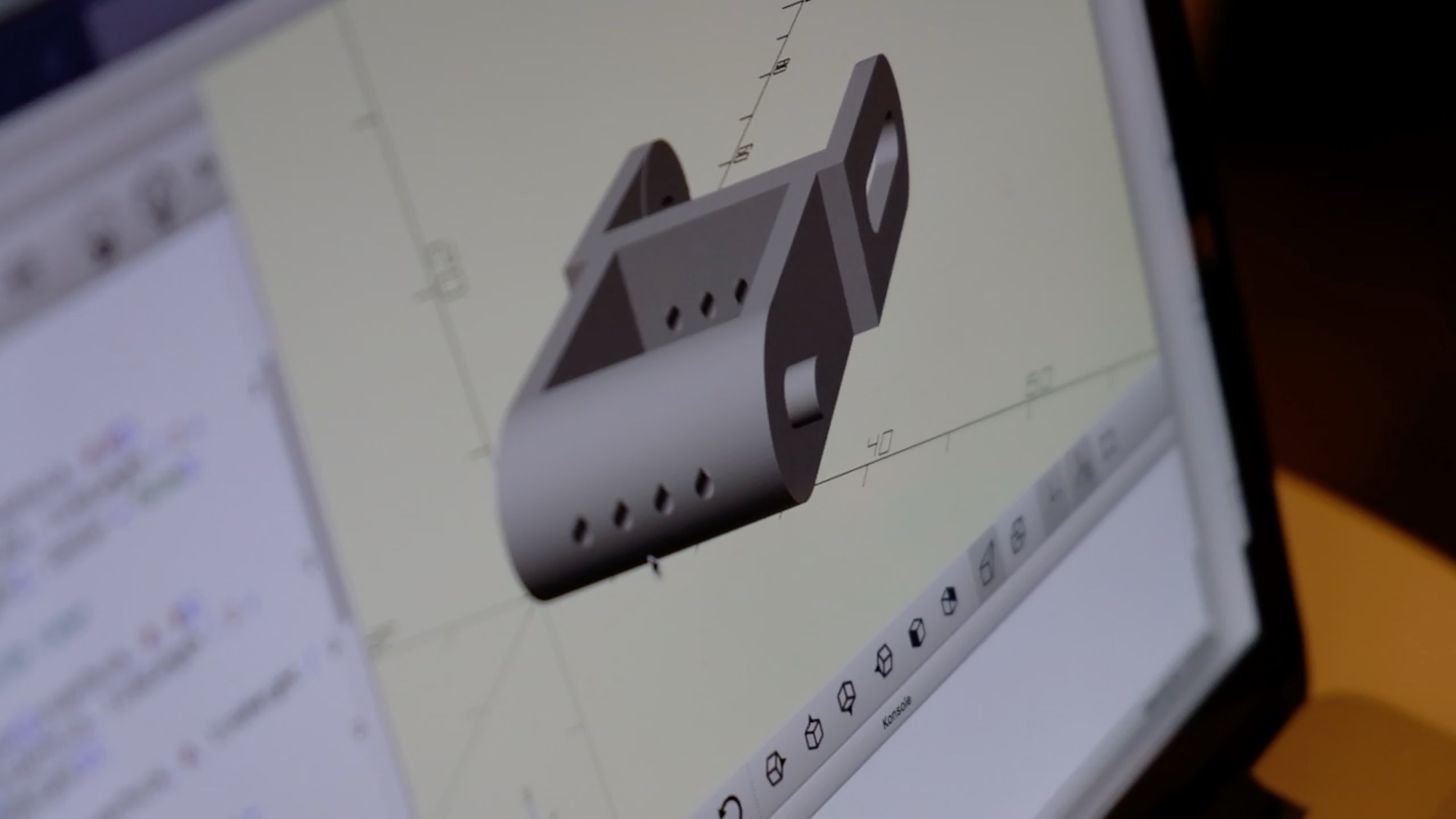
Soft robotic actors
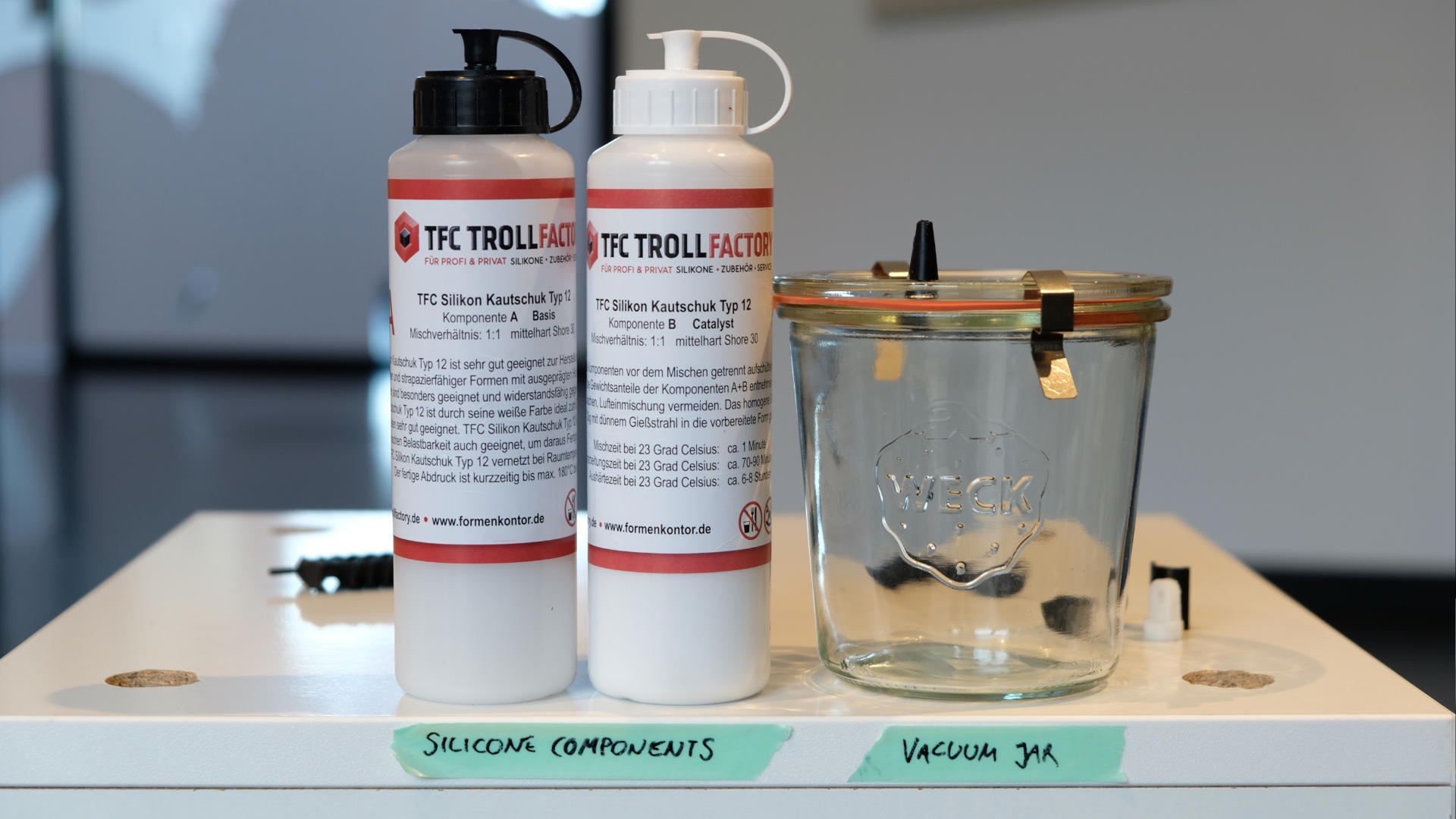
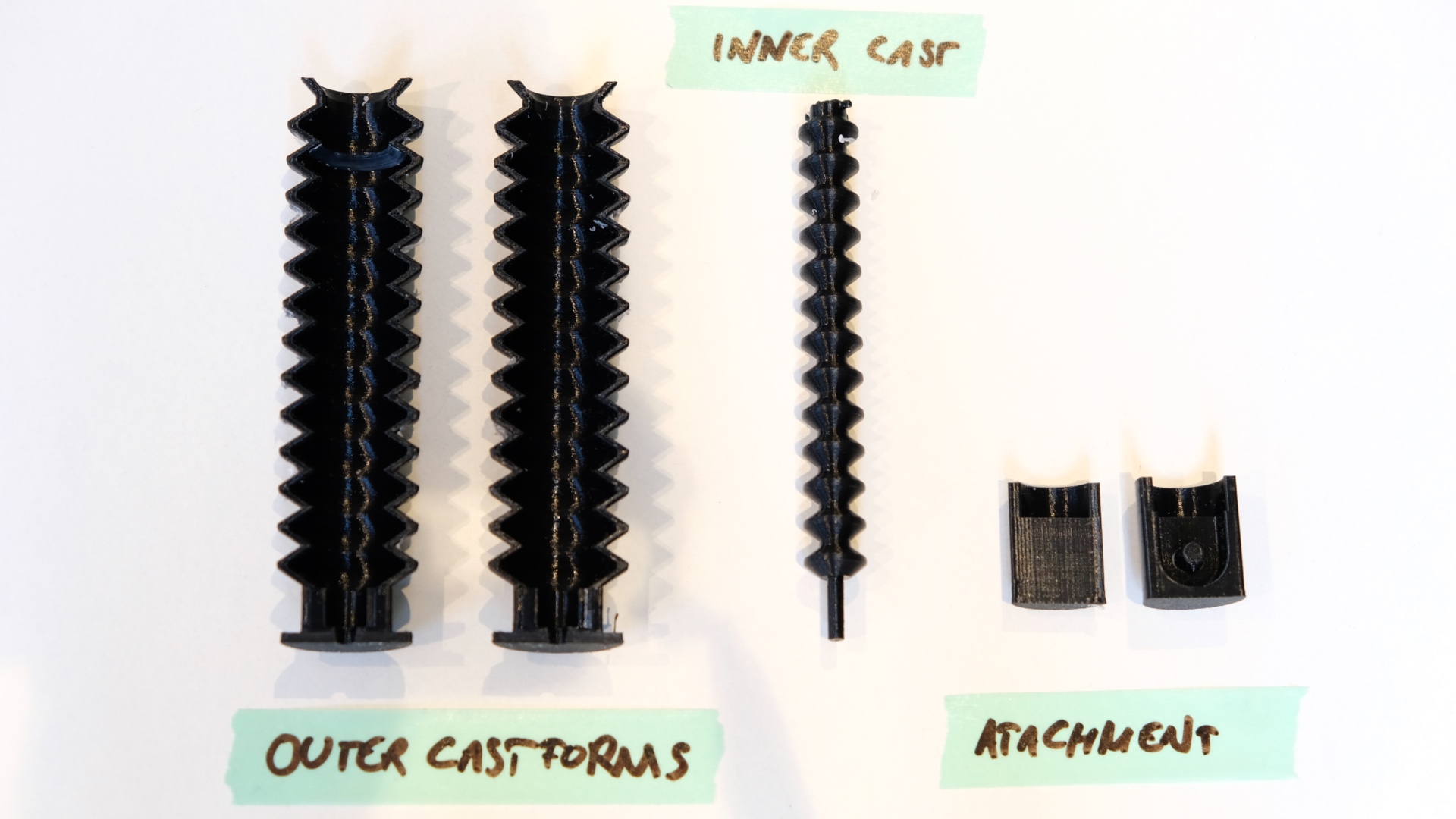
There were other candidates for the hugging mechanism: actuators from the soft robotics field. They are designed to contract under controlled vacuum pressure. Since no two actuators are alike, I cast my own using self-designed and 3D-printed molds and model building silicone. However, tests showed that the direct force path requires high vacuum pressure and thus large pumps and batteries. Too much for a discreet mechanism.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
06
Additional Tests
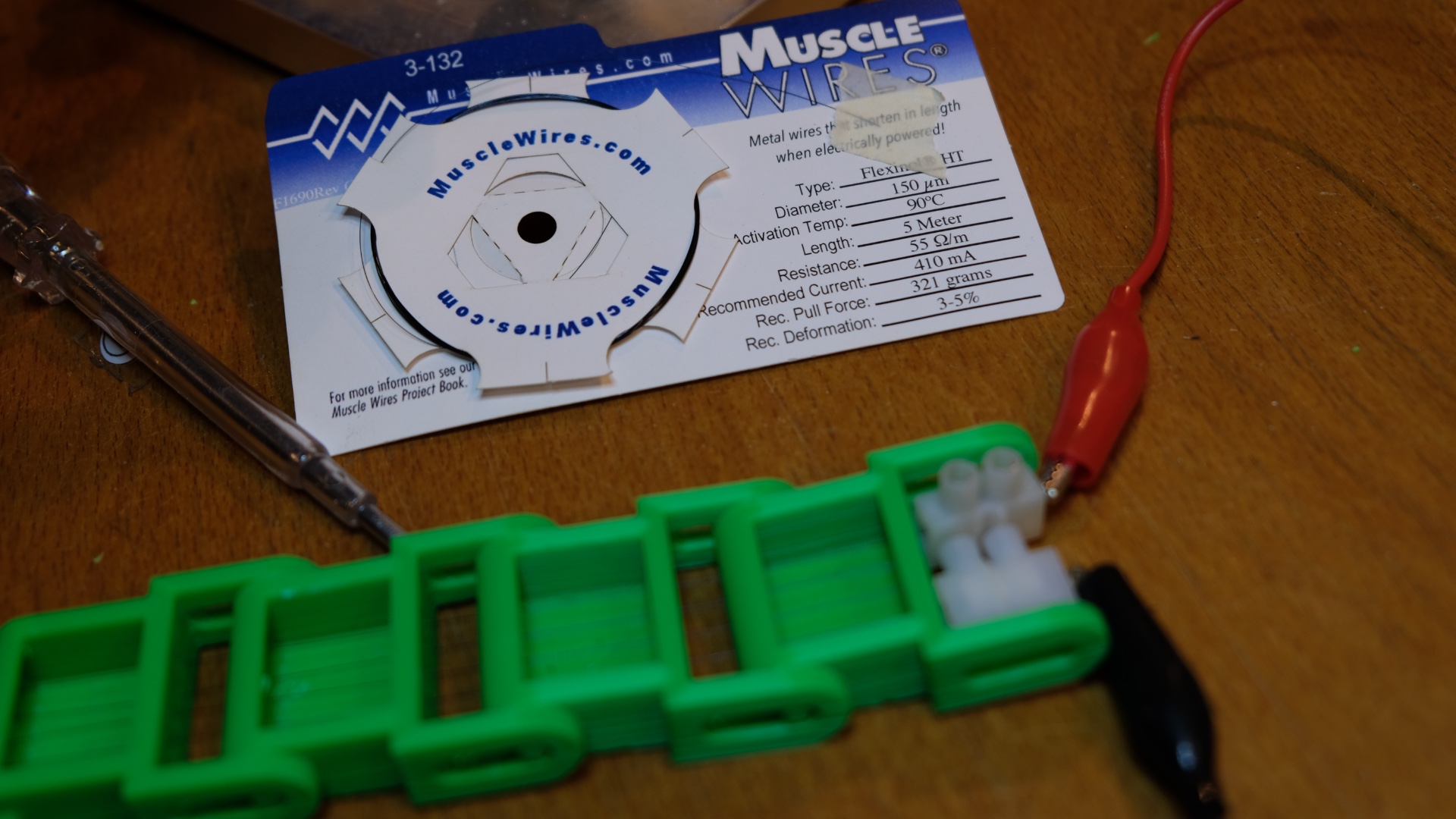
Nitinol wires
I also explored the use of Nitinol wire to influence the mechanical properties of the hoodie. This material, commonly known as Flexinol or “muscle wire,” is notable for its ability to contract when heated by an electric current. While this retraction is its most interesting property, experiments proved that the contraction was too small for the intended use. To enhance the effect, I tested longer wires redirected through pulleys, which improved the mechanical response but increased energy consumption. This, would have required larger batteries and a bulkier actuator box, forbidding the solution as impractical.
{kind=link}
{kind=link}
{kind=link}